I recently had some time to explore the feasibility of network-level horizontal curve extraction using my previous iterative circular fitting algorithm. Working on GIS base maps is definitely more challenging than on the GPS trajectories, because of three primary reasons: 1) the density of the point sequence changes dramatically between a tangent section and a curved section, which needs a new mechanism to dynamically adjust the maximum iterations in the algorithm; 2) the intersecting sections of the road create confusion in the point sequences, which needs a better segmentation of the network before applying the algorithm; 3) divided highways occasionally have different curvatures, which need a better result-merging and book-keeping mechanism to minimize duplication in the results. The original algorithm can be found here in this paper (link), but I had to update the algorithm with additional steps to address the three challenges mentioned above. Here is a sample result for Lonoke County, Arkansas, using the improved algorithm.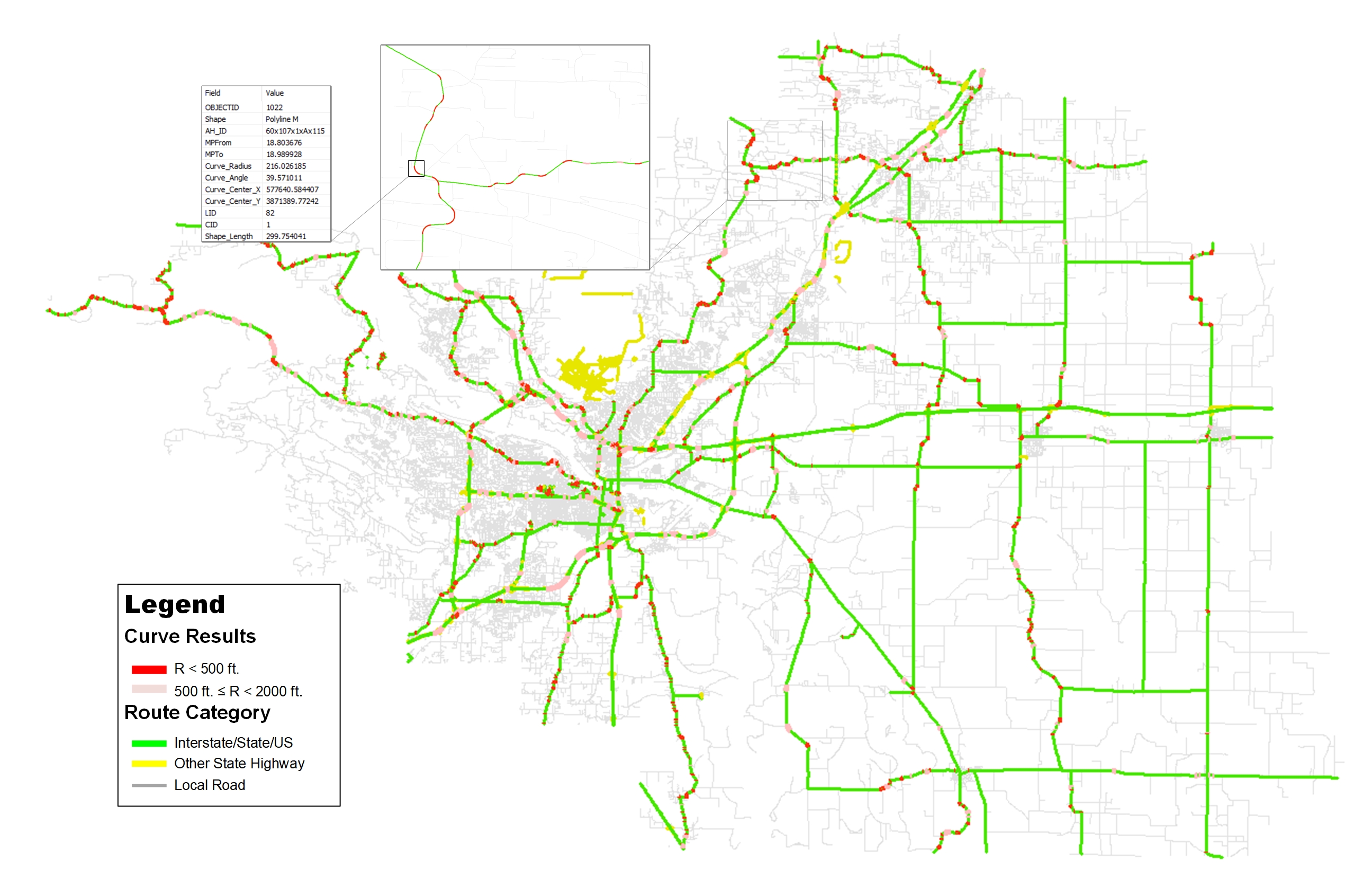 Obviously, Dr. Xu from the University of Nevada at Reno (link) and Dr. Li from the University of Louisville (link) have made a few steps ahead in applying their algorithms in a few GIS base maps. I hope soon I will be able to make a benchmarking among these state-of-art curve finding algorithms. In the meanwhile, I will try to collect different open base maps from state departments of transportation and share the network-level horizontal curve results using my improved algorithm. Hopefully, I will be able to accumulate enough results to create a national horizontal curve for most of the state highway systems. Of course, in a longer run, including local roads will create a whole new bunch of challenges, but that will be the next ambitious plan after the state highway systems.
Obviously, Dr. Xu from the University of Nevada at Reno (link) and Dr. Li from the University of Louisville (link) have made a few steps ahead in applying their algorithms in a few GIS base maps. I hope soon I will be able to make a benchmarking among these state-of-art curve finding algorithms. In the meanwhile, I will try to collect different open base maps from state departments of transportation and share the network-level horizontal curve results using my improved algorithm. Hopefully, I will be able to accumulate enough results to create a national horizontal curve for most of the state highway systems. Of course, in a longer run, including local roads will create a whole new bunch of challenges, but that will be the next ambitious plan after the state highway systems.
My recent TRB paper employs a really simple circular fitting methods, i.e. Kasa’s method, to extract and measure the horizontal curves. This paper was motivated by the three-point method developed by Jeff Harpring at New Hampshire Department of Transportation (NHDOT), yet the robustness is dramatically improved. The philosophy behind this paper is straightforward. A roadway section consists of consecutive segments and is considered as the minimal unit sharing a unique radius. A curved segment has a radius of R, while a tangent segment has a radius of infinity. The objective of iterative circular fitting is to automatically partition the GPS trajectory data that represents the roadway into delineated segments. Each segment shares the same radius measurement. Instead of selecting a fixed number of neighboring points for fitting, an incremental number of neighboring points are attempted until arriving at the least fitting error. The number resulting in the least fitting error will be associated with this group of GPS points. The fitting error is measured by the fitness of the actual GPS points compared to the approximated circle. The error curve is monitored and recorded separately until the global minimum value is derived at among all the attempted iterations. Once the number of neighboring points is selected for the current group of GPS points, the next circular fitting will be started by skipping the current group of points. Hence, optimized numbers of GPS points are selected for each group of GPS points (i.e. segment) through iterations. Per the request from Tim from NHDOT, I post some sample codes of the iterative circular fitting in MATLAB for his assessment purpose [download].
Ai, C. and Tsai, Y. (2014). “An Automatic Horizontal Curve Radii Measurement Method for Roadway Safety Using GPS Data.” 93rd Transportation Research Board Annual Meeting, Washington D.C.
Later, this idea was further developed into a full technical paper that is recently published in the Journal of Transportation Engineering. Additional steps for identifying segment types, curve classification, and spiral curve update is added into the methodology. The detailed methods can be found in this paper. The sample codes for these additional steps will be released at a later time. Hopefully, this method can be of uses for researchers and agencies.
Ai, C. and Tsai, Y. (). “Automatic Horizontal Curve Identification and Measurement Method Using GPS Data.” J. Transp. Eng. ,10.1061/(ASCE)TE.1943-5436.0000740 , 04014078.